一、带头人与团队介绍

王世全 博士 研发中心主任
- 负责研发中心整体运营管理及产品设计
- 斯坦福大学机器人实验室博士,10年以上机器人研发经验

叶熙阳 博士 研发中心首席技术官
- 负责机器人底层硬件及控制系统研发
- 斯坦福机器人实验室博士,10年以上经验,曾任职于新加坡科技研发局

钟书耘 博士 研发中心首席机器人科学家
- 负责机械臂规划算法、软件架构及仿真平台研发
- 斯坦福机器人实验室博士后,15年以上机器人智能规划及人机协作等研发经验

丁志豪 博士 研发中心副主任研究员
- 负责自适应产线的研发
- 佐治亚理工学院运筹学博士,8年以上效率优化经验,曾任Facebook数据科学家
二、 总体定位与发展方向
中心专注于研发、生产集高精度力控、计算机视觉和人工智能技术于一体的自适应机器人产品,在实际应用中面向终端客户提供一站式的、端到端的解决方案。通过赋能终端用户,降低机器人自动化的应用成本,在提升生产效率的同时,为客户带来更多实际价值。
三、 科研成果与产品展示
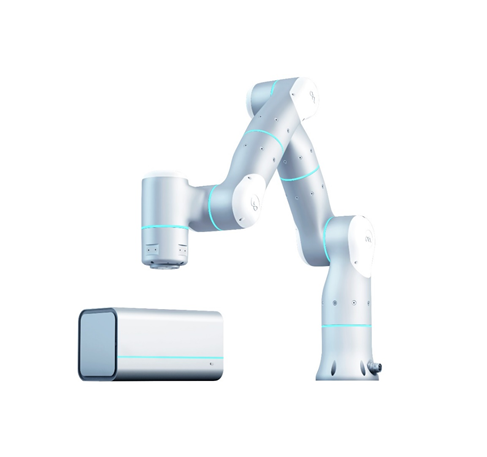
Rizon 4 拂晓4
作为世界上首台自适应机器人,Rizon拂晓深度融合了高精度力控、机器视觉和AI,可以适应不确定的工作环境,通过像人一样的手眼配合来完成复杂的工作任务,极大地提高了机器人的灵巧、智能和柔性通用程度,进而增强生产过程中的柔性和生产力,替代难以自动化的人工环节和升级低柔性的自动化产线。自适应机器人具备以下三个特性:位置误差容忍度高,抗干扰能力强,智能可迁移,从而能够做到对操作对象、环境和任务的自适应。
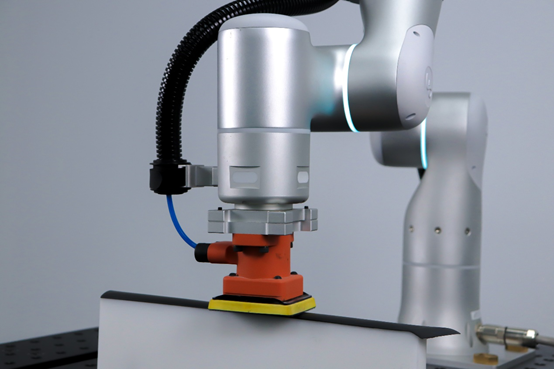
自适应机器人曲面打磨应用
自适应机器人所独具的高精力觉感知及快速响应能力,有效地去除木材表面毛刺、油污、灰尘等,兼顾表面的光滑度和附着力。针对不同材质及不同表面纹理的打磨,自适应机器人兼容性适配多种打磨工具。

自适应机器人力控装配应用
自适应机器人具备独特的高精力觉感知能力,可以对零部件(尤其精密零部件)装配过程中的微小力觉变化做出准确及时的反应,有效保证装配质量和效率。
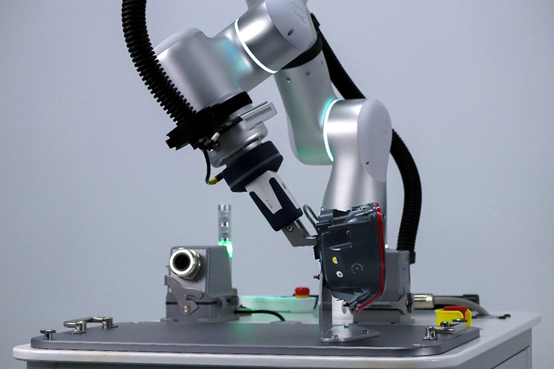
自适应机器人带线束插拔应用
凭借高响应度力觉系统,结合世界领先的AI视觉,可以在不借助外界辅助装置的情况下,在复杂环境中识别插头型号和位置姿态,自动引导避让障碍物,完成抓取和插拔装配工作。
四、联系我们
深圳清华大学研究院自主式机器人研发中心
联系人:佘凤珠
电话:15920333020
地址:深圳市南山区科技园南区南七道深圳清华大学研究院C508